
告别噪声初始化:NTU MARS Lab提出A2A新范式,实现机器人高性能单步动作生成
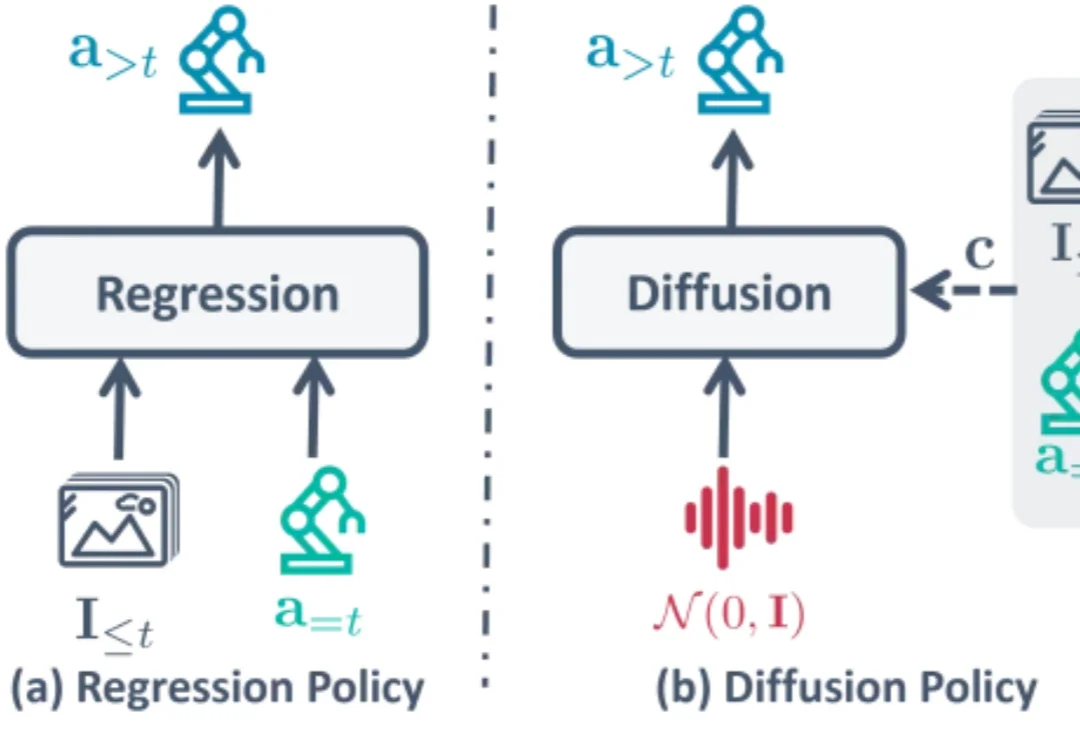
告别噪声初始化:NTU MARS Lab提出A2A新范式,实现机器人高性能单步动作生成在机器人领域,扩散策略(Diffusion Policy)已经成为了标准模仿学习策略和 VLA 动作生成范式,但其「从随机噪声中迭代解噪」的机制带来了不容忽视的推理延迟。如果机器人不再从随机高斯噪声开始「盲猜」,是否可以基于「刚刚做了什么」来预测「下一步做什么」呢?
来自主题: AI技术研报
6761 点击 2026-03-20 09:39